Active
The detection of Active Trackpings is the same for both varieties of Track Boxes, using the on-board 2.4GHz module to receive passings.
If using a Track Box Passive to receive Trackpings then additional consideration should be taken for mounting the devices due to the decreased detection radius, additionally Dual Track Box Synchronization should not be used when also recording Active Trackpings.
Track Ping Detection
Track Boxes operate using 2.4GHz for communication, and can be set to one of 8 channels and tracking mode on Transponders should be activated on the same channel. Since these are the same 2.4GHz channels used by transponders for communication with active timing systems, the channel used for tracking mode should be different from those used for timing points to prevent saturation of the 2.4GHz channel.
When active the Track Boxes are constantly waiting to receive Track Pings from transponders which have tracking mode activated. The range of the antenna ensures that Track Pings should be received within a minimum radius of 50m, in clear environments with little interference this range may be even wider.
Since Track Pings are sent in a short interval (interval depends on the transponder and the current status), the Track Box is likely to receive multiple Track Pings from each transponder. To optimize the accuracy and reliability of data the Track Box uses a detection algorithm to only send the most accurate time or recently seen transponders.
For each Track Ping received the Track Box also sends an acknowledgement to the Transponder, this ensures the transponder's tracking mode remains activated according to the tracking mode time limits.
Times will be sent in batches, the frequency of which depends on the number of Track Pings being received. If no Track Pings are being received then the Track Box will only communicate with the server every 4 minutes.
Track Ping Algorithms: Stationary vs. Moving
Track Boxes have integrated motion sensors which allow them to determine whether they are currently moving, or stationary, which has an impact on the way they manage trackpings sent by nearby transponders.
Stationary Algorithm
When a Track Box considers itself stationary, it tries to calculate and send the most accurate time possible, much in the same way as our traditional timing systems.
For Active Trackpings there are 2 values to consider:
- Maximum Observation Time (30s): The maximum length of time a transponder is monitored for before sending a passing. This minimizes delays in receiving passing data if a transponder remains in range of a Track Box for a long period of time.
- Reaction Time (10s): How long the device will wait for a TrackPing with a higher RSSI value before sending the data, except if the Maximum Observation Time is reached. This behaves in a similar manner to the Reaction Time of a Decoder.
If a Trackping with a higher RSSi is received within 10s of the previous strongest signal then the transponder will continue to be monitored, unless 30s has elapsed from the first TrackPing received from the transponder. After a passing is stored then the Maximum Observation Time will reset.
In this mode, you may expect the detection to be accurate to approx 1 second, if the participants are traveling fast enough. If the participants are traveling slowly and staying in range of the Track Box for a long time, you are likely to receive several passings.
Moving Algorithm
A Track Box will switch to the moving algorithm as soon as it detects that it has been traveling at over 5 km/h.
When the Track Box considers it is moving, it does not make sense anymore to follow the transponders for a certain time to try and determine the highest signal strength, since both the Track Box and transponders are moving.
The Track Box then groups all the trackpings received and sends them every 10 s.
If the Track Box stops moving for over 1 minute, it will switch back to the stationary algorithm.
For every trackping, the Track Box indicates which algorithm was used. More information about this is available in the TrackBox Protocol.
For timing purposes, you obviously need your Track Boxes to be stationary at the timing location. Placing Track Boxes on an object that is moving slightly (e.g. on a tree, or on a floating boat or buoy) should not be a problem, as Track Boxes are able to ignore small movements.
Detection range: standard vs. directional antenna
Active Track Boxes are delivered with the same standard antenna as other active system devices. With the standard antenna, in a typical use case you should detect trackpings from all transponders within a 50 m radius, and may probably detect trackpings at a much wider range.
If using the Track Box Passive to receive Active Trackpings then the range will be reduced as the 2.4GHz antenna is only internal.
If you need to receive trackpings from a longer distance, you may consider using the 14 dBi high-gain directional antenna available in our shop. With this antenna, you can detect trackpings up to 700 m away in the direction the antenna is facing. It is important to note that the range is only slightly reduced in all other directions when compared to the standard antenna, transponders will likely be detected at the standard radius of 50m, regardless of the antenna used.
Important: the high-gain directional antenna is only to be used with Track Boxes, to receive trackpings! Using it with other active timing devices exceeds regulatory limits on transmission power.
Here is a graphic representation of the ranges you can expect from each type of antenna:
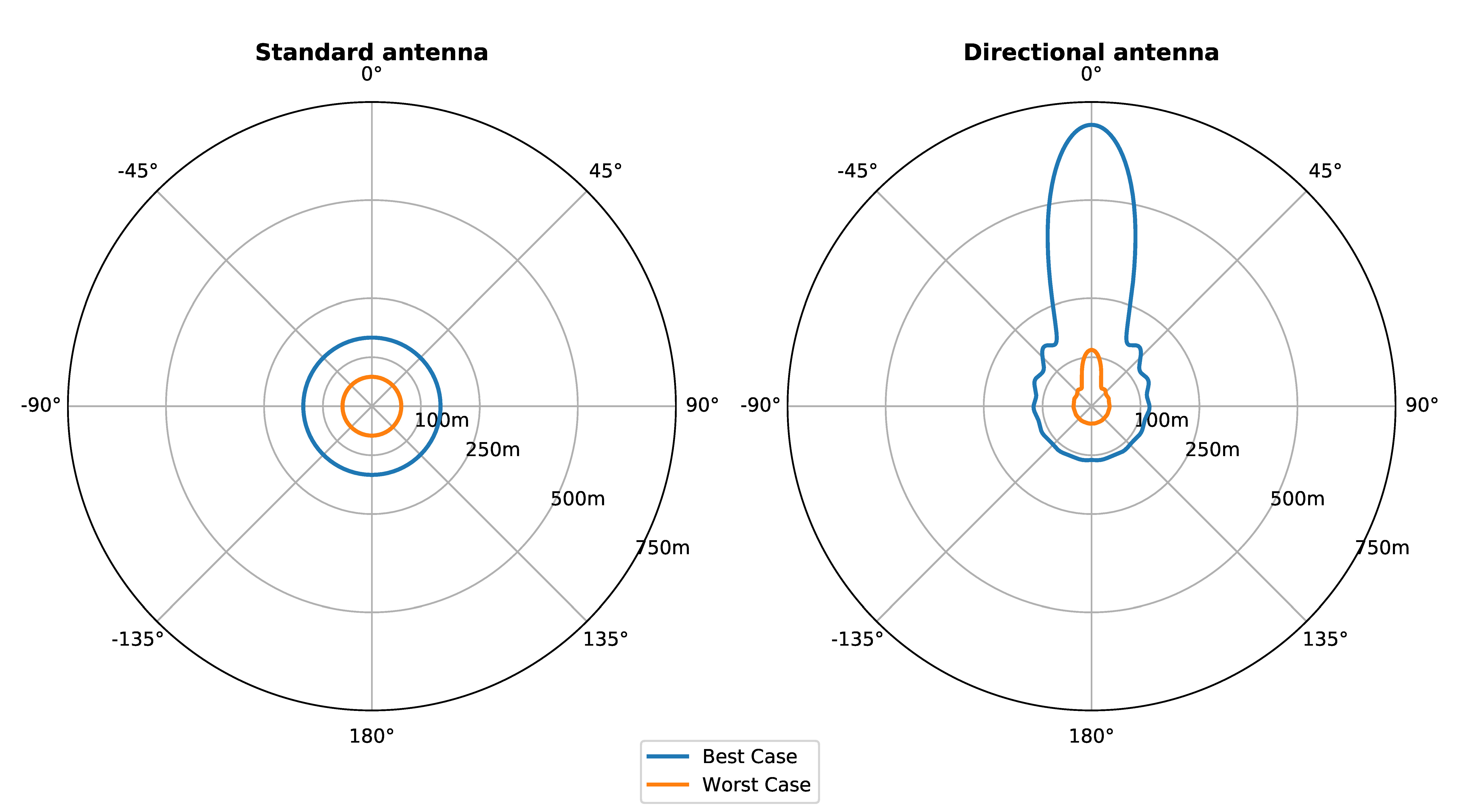
Note that these are only estimates, you may actually detect trackpings from further away depending on the environment, for example next to a lake or a river. Note that the orientation and immediate surroundings of the transponder will have a big influence on the range you can expect. Track Pings sent while the transponder is under water will of course not be received, and while in free air, any obstacle between the transponder and the Track Box (e.g. a wetsuit, the participant's body, etc.) will reduce the detection range.
Practical Applications
Stand Up Paddle on a River
At an SUP in early December 2018, we set up split timing locations with two active Track Boxes, one using a directional antenna, the other with a standard antenna. Here is a picture of the set up at one of the splits, and a chart showing the RSSI values of the trackpings with the directional antenna (in orange) and the normal antenna (in black). The paddlers were crossing the timing point on the opposite side of the river.

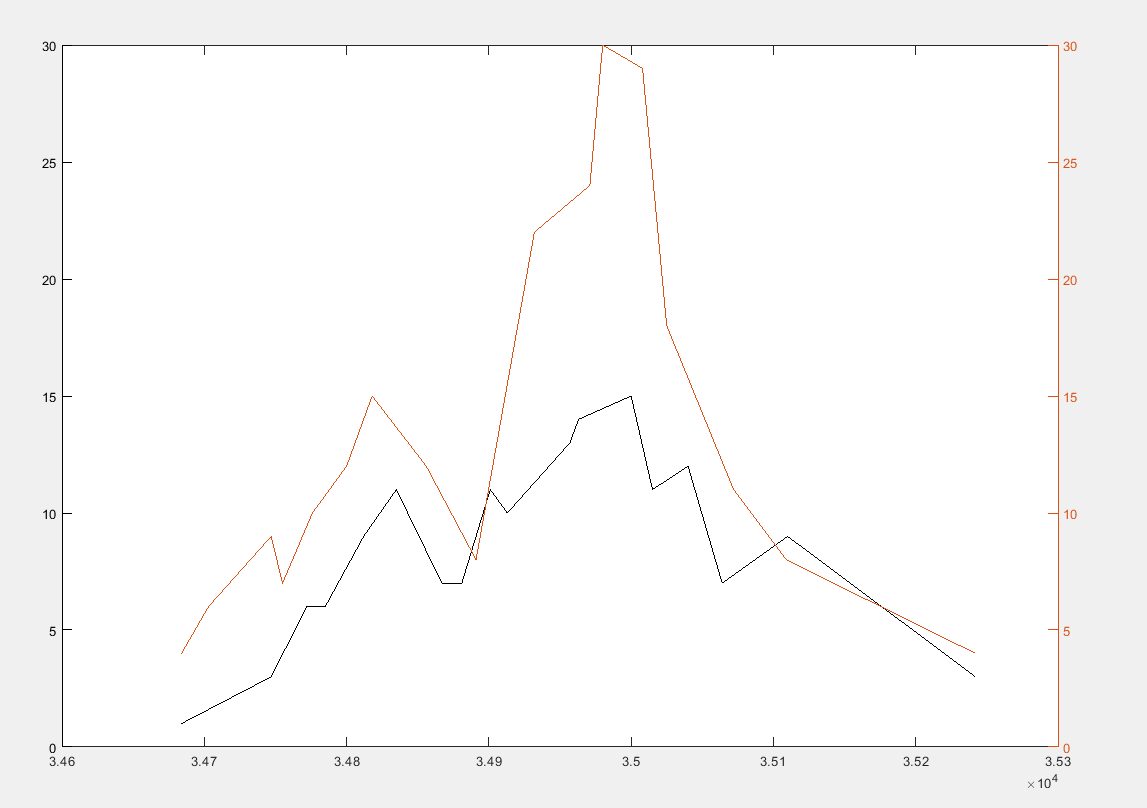
As the charts show, the directional antenna records trackpings with a higher signal strength, and the peak in signal strength is more pronounced. In such a use case, the directional antenna makes it more likely to receive the trackpings, even at longer ranges, and makes it easier to identify the closest detection from several detections received because of the low speed. Here we would recommend using the direction antenna.
Bike split of a triathlon event
At a long distance triathlon event in June 2018, we tested the accuracy of two active Track Boxes (one with a directional antenna, the other with a normal antenna) against a decoder with Active Extension at a split on the bike course that was crossed 4 times.
Below is all the raw data collected from this point for the winner of the event. The data is highlighted in green (decoder), pink (Track Box with standard antenna) and blue (Track Box with directional antenna)
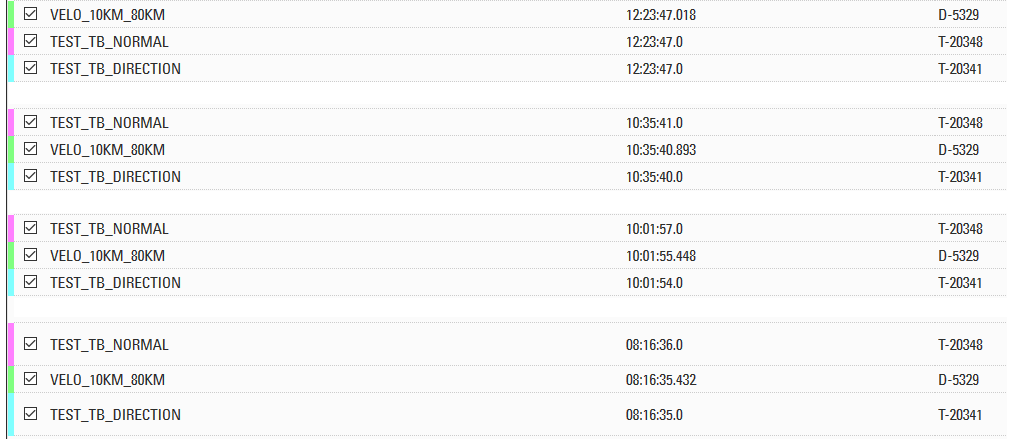
As you can see, for each crossing, the Track Boxes consistently collected only one trackping, and recorded a time that is normally within 1 second of the decoder detection, regardless of the type of antenna used.
In this case, at close range and high speed, the directional antenna does not provide any advantage compared to the standard antenna.
Passive
Antennas
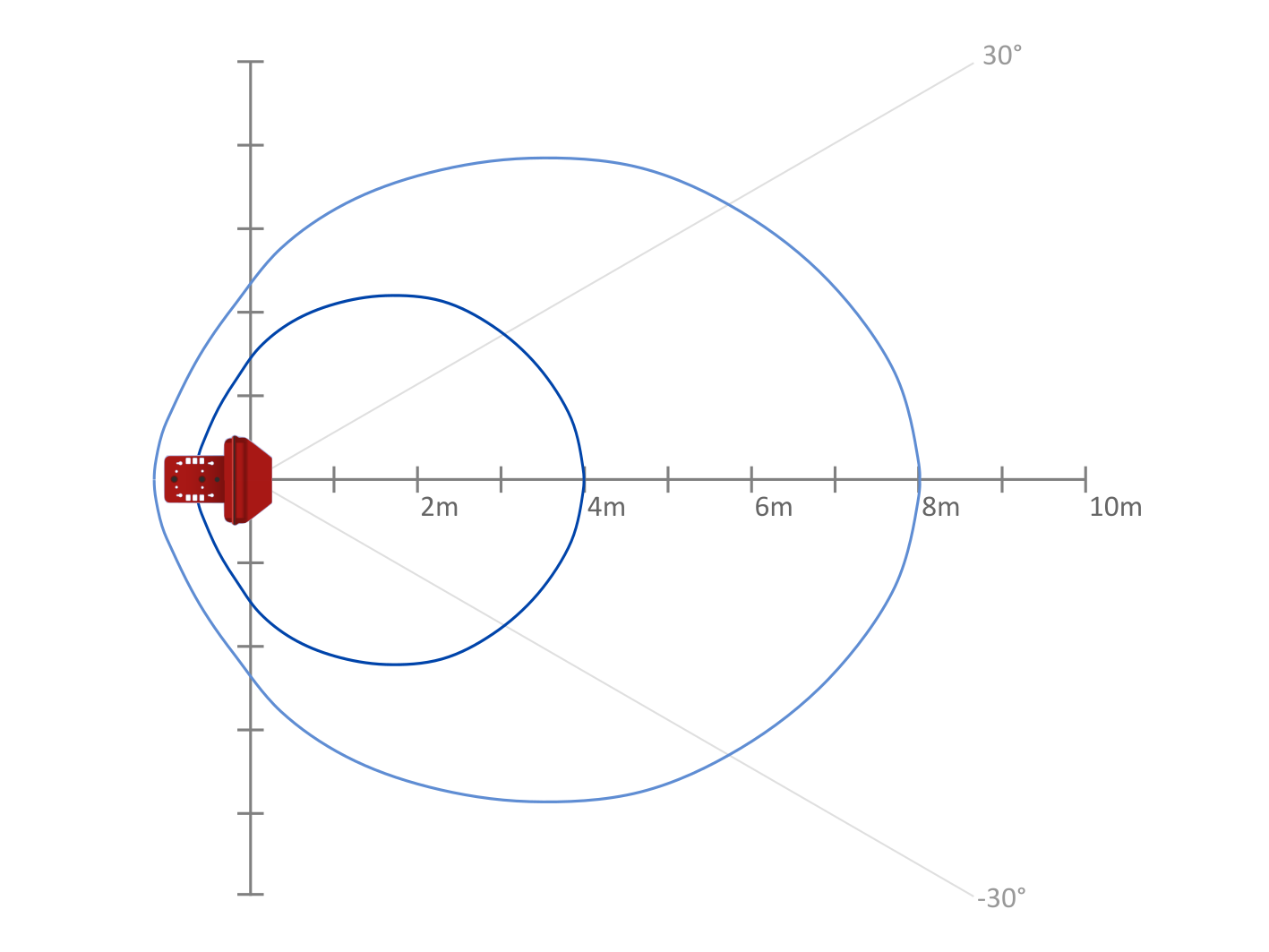
To optimize performance in a small form factor the Track Box Passive contains 2 antennas internally, TX (transmit) and RX (receive). The TX antenna is located in the lower half of the box and the RX is in the upper half, each antenna needs a clear line of sight to transponders in order to receive passings.
The below diagrams show the shape of the antenna field, the inner line represents expected 99% read rate at 4m from the front of the antenna, the outer line shows the 8m line with 90% expected read rate (with a single box).
Side View
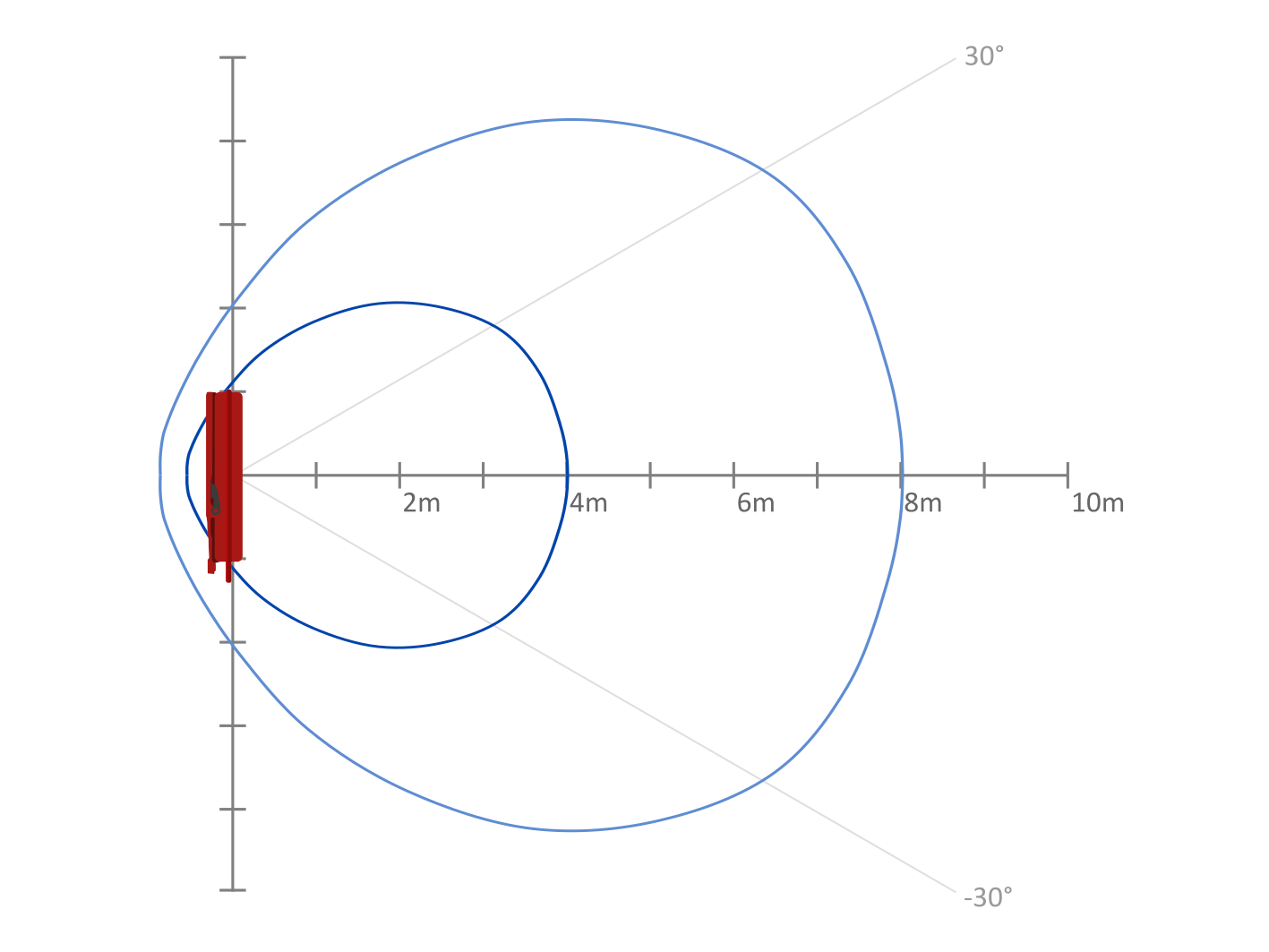
Top View
Algorithms
Passive Transponders
Reaction Time & Dead Time
Similar to the RACE RESULT Decoder the Track Box (Passive) uses a detection algorithm to maximise the accuracy of recorded times.
The 2 key settings are the Reaction Time and Dead Time, which by default are set differently on Track Boxes due to their design.
The default Reaction Time is 10 seconds, the reason for this is that with antennas mounted to the side there is much greater chance of early detections, particularly if the Track Box is facing participants. A low reaction time may result in a less accurate time being recorded, by increasing this to 10 seconds it provides greater chance to record an accurate time. This does result in data being sent to the servers after a minimum of 10 seconds, so if speed of data is more critical than accuracy then this could be reduced.
Dead Time is set by default to 20 seconds, meaning that after a time is recorded then another passing will not be captured for 20 seconds, beware if using this on short laps or turnarounds. If multiple passings are expected within a shorter time then this can be reduced as necessary.
Both reaction time and dead time can be configured using Track Box Configuration Rules.
Hits & RSSI
When using the Track Box (Passive) you should also expect less hits compared to a RACE RESULT Decoder with standard antenna, this is due to the communication protocol used between Track Box and Transponder.
The reader will only communicate with each transponder in one of every 5 cycles, this maximises the opportunity for other transponders to communicate with the reader and thus maximising overall read rates.
Guidelines for RSSI values remain the same as Decoder detection data.
Modes
The Track Box Passive has 3 detection modes which impact the read rates of antennas, data transmission and thus also have an impact on battery performance.
Fast
In fast mode, the network modem stays connected permanently. The status of the box is updated every 15s and upload of passings is as fast as possible. This does not increase the read rate of the antennas but speeds up data communication.
This mode will drain the battery faster and use more data, so should only be used if battery and data consumption are not a concern.
A typical application for this would be a timing point for an announcer who requires the fastest data.
Normal
Normal mode is the best compromise for general timing and recommended for most applications. In this mode, the GPS module is shut down if the box does not move and the device status will be updated every 4 minutes.
In normal mode the antennas are reading 50 times per second, and passings will be uploaded in small chunks with smart processing to minimise delay and data consumption accordingly. If there is no data transmission pending then the modem will disconnect from the network.
Slow
Slow mode maximizes battery life of the Track Box Passive whilst still reading transponders. In slow mode the read rate of antennas is reduced to 10 times per second, this is suitable for slow-moving, low density splits (only reading a few transponders simultaneously), and will also produce less accurate times.
The data transmission and GPS module behaviour remains the same as normal mode for upload of passings and status.
In slow mode, you can expect battery life of over 24 hours from a full charge.
Track Box Synchronization
As with all UHF timing systems a transponder should only be in the field of one reader at any one time, furthermore, the strong output of one reader may inhibit the receive antenna of another box when directly facing each other.
To avoid interference between devices, Track Boxes are able to synchronize using the on-board 2.4Ghz which prevents the collision of the UHF readers. There are 2 modes of synchronization - pairing (2 boxes) and multi (more than 2 boxes).
Two or more boxes will automatically synchronize their UHF Readers to optimize read performance when:
- The boxes are within close range to each other (approx. 20m)
- The same 2.4GHz channel is set
- The reader is turned on (not in standby or laying flat)
- The reader is in NORMAL or FAST mode (not SLOW)
When synchronization is active the green LED (to indicate GPS & Network OK) will switch to a quick double blink.
Dual box synchronization is always enabled automatically regardless of the orientation of antennas, as even 2 boxes with their back to each other may experience some interference.
Synchronization is automatically disabled if the above criteria are no longer met, for example if the boxes are moved apart or the channels of the boxes are changed. It is also possible to disable dual box synchronization using Custom Track Box Configuration Rules.
As Track Box synchronization and Active Track Ping Detection both rely on the 2.4GHz antenna it is not advised to use the Track Box synchronization whilst also expecting Active Track Pings, since this will reduce possibility for the Track Boxes to receive Active Track Pings. Additionally, Track Boxes can only operate on a single channel, so changing the channel for pairing devices will change the channel on which the device is expecting to receive Track Pings.
Track Box Pairing
Using two Track Boxes together allows to cover a greater width of timing point and also maximises the chance for a clear line of sight between the antennas and transponders. When in pairing mode the Track Boxes will report SYNC in the RACE RESULT 14 Timing tab.
When in pairing mode the read rate of each box will be reduced by just over half to around 20x per second (down from approx 50x a second for a single unpaired box), this will result in reduced hits per box, for each transponder. When comparing a pair of boxes to single box performance you can expect roughly similar hits however the sum of the pair is still likely to be slightly lower due to having just under half the available read time per box.
If you have multiple boxes in close range, then you can create pairs of devices by setting the channel accordingly for each device. In this case, you should take care that any 2 boxes which are not synchronized do not have overlapping fields which may cause interference.
Multi Track Box
When more than 2 Track Boxes are in close range and meet the synchronization criteria they will enter Multi mode, this is also indicated in the RACE RESULT 14 Timing tab (MULT)
In Multi mode each box will drastically reduce its read rate to a much slower random mode. This mode is intended for use with indoor applications with many boxes in close proximity and is not intended for sports timing.